可重构智能表面(RIS)是一种新型的人造可调谐反射阵列,可以通过改变电磁波的传播路径和方向,实现对无线信号的精确控制。在传统的单基雷达测量中,由于角度的估计误差会导致较大的目标位置测量误差,且利用卡尔曼滤波法进行速度测量的精度较低。RIS作为一种低成本的反射阵列,能够将不同的观测视角的回波信号反射给接收机进行处理,从而极大地提升雷达获取的信息量,以降低对目标位置和速度估计的误差。
本文对所提方案进行了仿真验证。为了验证RIS辅助雷达对目标位置测量的优势,在相同的RIS尺寸大小情况下,对比了不同数量的RIS辅助下对目标位置估计的准确度,仿真结果如图1所示。结果表明,RIS辅助雷达的目标位置测量性能远强于传统单基地雷达。且RIS数量越多,目标位置估计的性能越好。

图1. 不同RIS数量下位置估计的CRLB
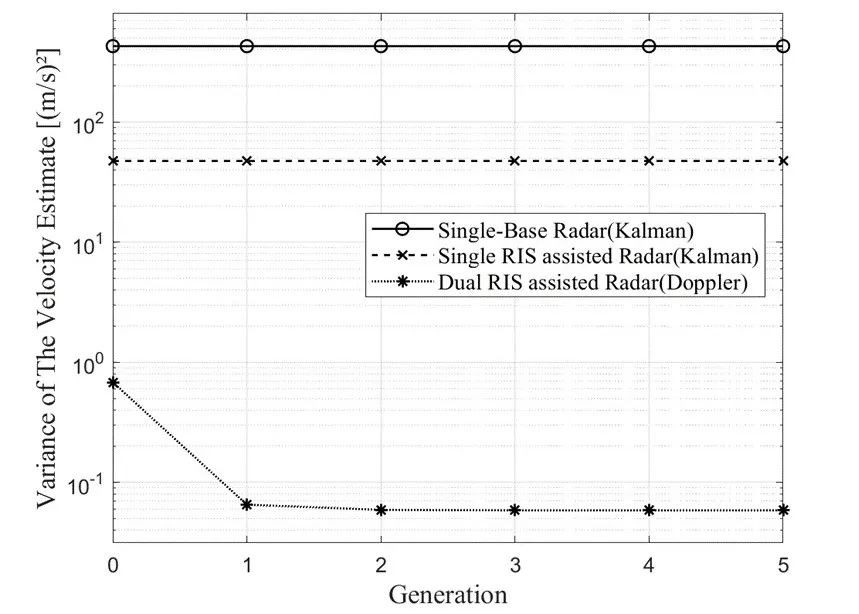
同样将RIS辅助的雷达对目标速度测量与单基雷达进行了对比。单基雷达通常利用卡尔曼滤波法对目标的速度进行测量,该方法严重依赖于对目标位置测量的精度,仿真结果如图2所示。结果表明,本文所提出的方法对目标速度测量的精度远高于单基雷达。
全文下载:
http://engine.scichina.com/doi/10.1360/SSI-2023-0072
相关阅读